ソフトウェア入門界隈ではScratchというのはある種の定番になりつつありますが、Maker界隈では似たようなものを聞かないなということに気づきました。
ということでArduinoのビジュアルプログラミングについてまとめておこうと思います。
今回選んだ基準は次の通り。
- Blocklyベースであること(次期Scratchのベースらしいので移行が楽そう)
- Githubに上がってること
という感じで検索かけた結果が次の通り。
- BlocklyDuino
- ardublockly
- Mixly_Arduino
- Blockly@RDUINO
一つずつ試していきたいと思います。
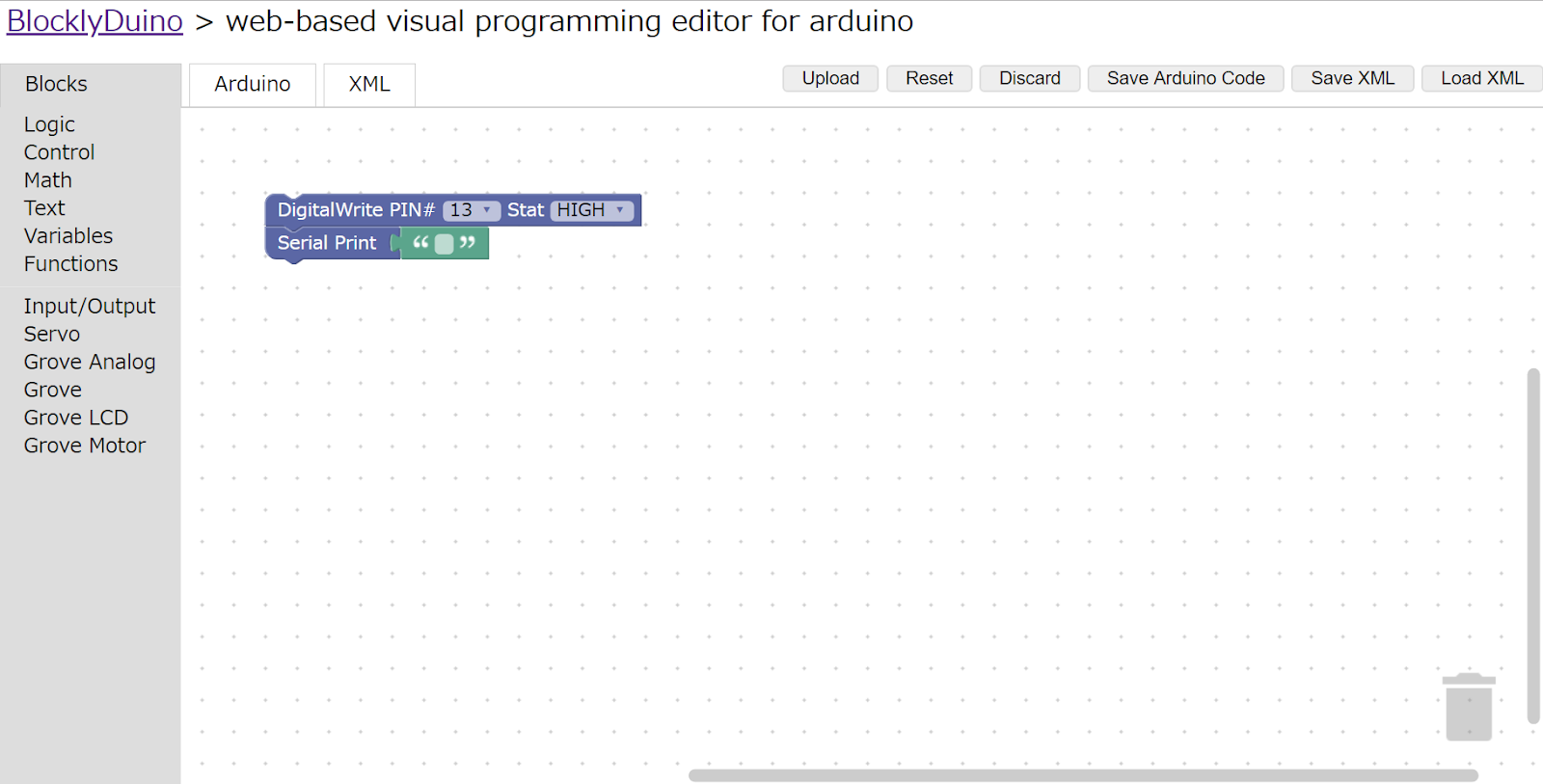
BlocklyDuino
最終更新日:2017年11月
一番Star数多かったやつです。古いだけあってデザインはとてもシンプル。
うちの環境ではオフライン版でもアップロードがうまくいきませんでした。Pythonのバージョンの問題かもしれません。
欠点としては、digitalwriteのHIGH/LOWに変数を使うことができません。
あとsetupとloopという概念がblockly上では存在しません。
Arduinoのコードとblocklyが並列で表示されないのが個人的にはあまり好きになれませんでした・・・
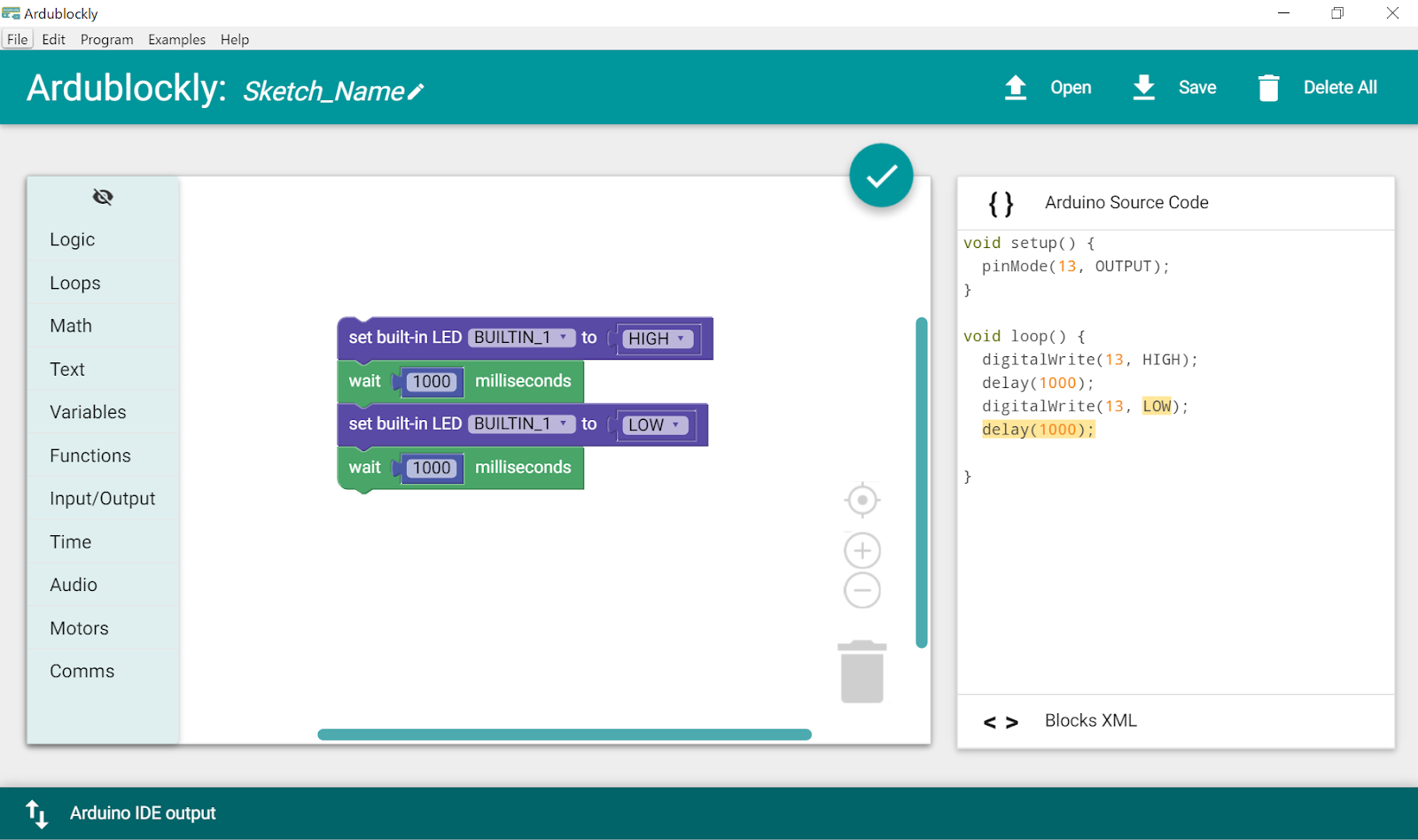
ardublockly
最終更新日:2018年2月
デザインがめちゃめちゃいいです。wikiとかも充実しててすげー好みです。
ただArduinoとの連携が若干うまくいってないのか、めちゃくちゃupload・verifyに時間かかりました。
個人的にはこれにarduinoのCLI統合して、さらにピン番号を変数で指定できるようになったらもう完成形だと思います。
Mixly_Arduino

オンライン版:なし
最終更新日:2018年11月
blocklyベースなのにオンライン版がないという異色のソフト。めちゃめちゃ展開に時間かかりました。
Microbitとかの開発もできるようです。
中華でちょっと怖さはありますが、ピン数を変数で指定できるなどかなり高度です。
デザインもかなりいい感じで、arduinoとの連携もうまくできそうです。
wikiが中国語しかないのと完全なオープンソースでないのが残念な感じですね・・・
Blockly@RDUINO
オンライン版:なし?
レポジトリ:https://github.com/technologiescollege/Blockly-at-rduino
最終更新日:2018年11月
デザインを見る感じは良さそうなのですが、ブロックが全然表示されません。
しかもreadmeなどがフランス語というおまけつき。結局使い方は全く分からず。
というわけで見てきました。
全部微妙といえなくもない結果ですが、使うとしたらardublocklyでしょうか・・・?
性能だけで見ればおそらくmixlyが一番なのですがね・・・、中華というだけで恐怖が・・・